На МКС испытают шагающего на "ножках" микроробота
Специалисты холдинга "Российские космические системы" освоили экспериментальное производство действующих образцов микроробототехнической шагающей платформы для работы в космосе.
"Эта разработка станет основой при создании перспективных автономных микроробототехнических устройств для инспекции труднодоступных областей на поверхности и во внутренних отсеках космических аппаратов, а также позиционирования различных модулей космических аппаратов", - цитирует "Интерфакс" сообщение пресс-службы компании.
По информации пресс-службы, шагающее движение робота происходит за счёт программируемой деформации "ножек". При нагреве от подачи напряжения "ножка" разгибается в заранее определённых местах, а при охлаждении сгибается.
"При весе всего в 70 мг подвижная платформа может удерживать нагрузку в 20 раз больше, а перемещать - в пять раз больше собственного веса. При этом скорость его движения составляет около 14 мм в минуту, что очень быстро для изделий этого типа и такого размера", - информирует пресс-служба.
Отмечается, что в отличие от создаваемых в мире аналогов концепция российского микроробота на основе разработанной платформы сможет перемещаться по шершавым, ступенчатым и наклонным поверхностям.
"Для передвижения микроробот задействует не менее восьми "ножек" со специальным адгезионным покрытием, позволяющим ему в невесомости "прилипать" к поверхностям. Каждая из "ножек" имеет "ступню", которая может менять угол во время движения. Благодаря этой особенности он может перемещаться по различным поверхностям. В более сложном варианте на "ступне" предполагается создание дополнительного массива из "ножек" меньшего размера", - говорится в сообщении.
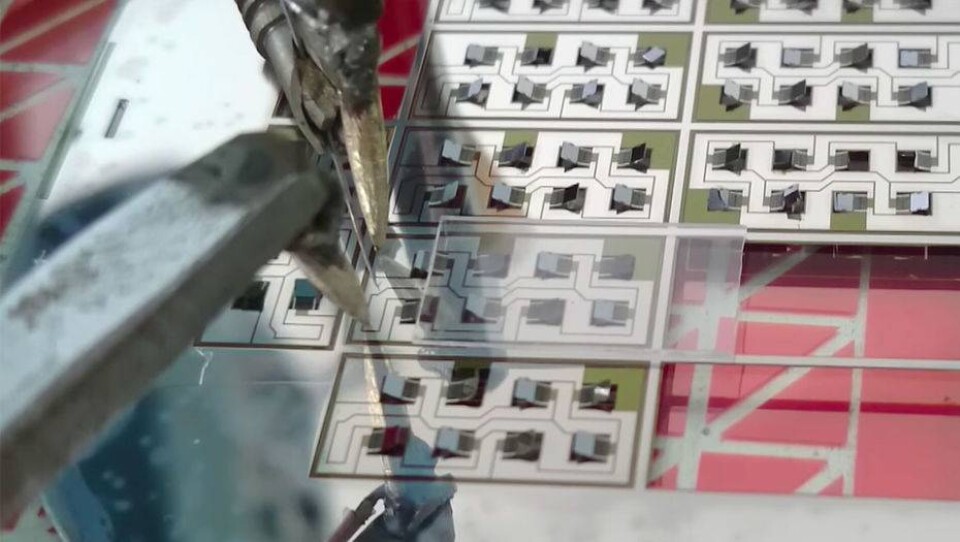
В сообщении приводятся слова руководителя сектора микромеханики РКС Игоря Смирнова, который пояснил, что вся подвижная платформа - это одна многослойная деталь, технология производства которой похожа на изготовление микросхемы. "Это - единый технологический процесс без сборочных операций. В основе устройства всего два материала - кремний и полиимид, которые мы получаем от российских поставщиков", - сказал он.
По словам ведущего научного сотрудника сектора микромеханики РКС Дмитрия Козлова, на которого ссылается пресс-служба, дальнейшие исследования разработанных робототехнических устройств предполагается вести в направлении создания биоморфных систем.
"Мы внимательно изучаем движения животных и строение их конечностей (например, семейства гекконовых ящериц) и используем эти данные при моделировании различных аспектов работы устройства, в том числе в невесомости: характер движения "ножек", свойства ворсистого адгезионного покрытия на них, а также модель сил, действующих на платформу", - сказал Козлов.
В сообщении отмечается, что прототип микроробота может работать в диапазоне температур от -200 до +200 градусов Цельсия при отсутствии земной атмосферы, а также устойчив к радиации и воздействию атомарного кислорода в открытом космосе.
"На следующем этапе работ планируется оснащение микроробототехнической платформы разными типами полезной нагрузки и проведение космического эксперимента на борту Международной космической станции (МКС)", - информирует пресс-служба.